『星¤空』
所在地区:
河北省-廊坊市
首页
服务/硬件产品
行业解决方案
案例
方案概述:
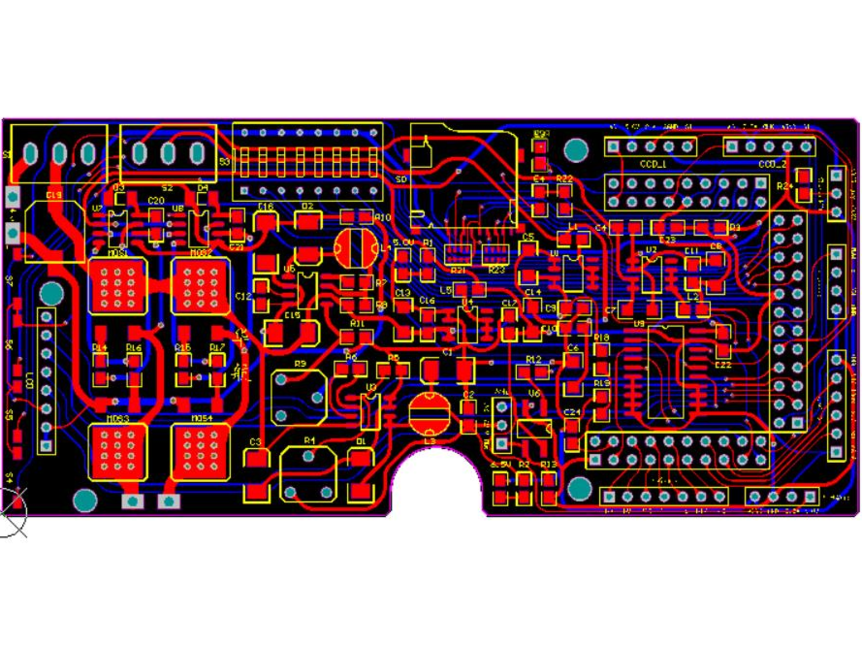
飞思卡尔光电组是一个包括CCD传感器、按键电路、LCD液晶屏显示电路、电源部分、电机驱动、速度检测和控制器等组件的系统。该系统可以用于光电测量、图像处理、自动控制等工业领域的应用。解决方案包括位置型PD控制和非线性PD算法,以及PID调节经验。该方案适用于工业领域的光电测量、图像处理和自动控制等应用场景。
解决方案:
根据标题“飞思卡尔光电组原理图+PCB+应用笔记”,我们可以基于该标题内容提供以下解决方案。
飞思卡尔光电组是一个包括CCD传感器、按键电路、LCD液晶屏显示电路、电源部分、电机驱动、速度检测和控制器等组件的系统。该系统可以用于光电测量、图像处理、自动控制等工业领域的应用。
在该系统中,舵机和电机的PWM调速频率分别为300HZ和10KHZ。舵机的角度控制精确到1.5度,一般采用位置型PD控制方法进行控制。位置型PD控制的计算公式如下:
perror[2]=(width[2]-width[4])/2;
out_p=Kp*perror[2]/20;
out_d[2]=Kd*(perror[2]-perror[1])/20;
out[2]=out_p+out_d[2]+center_conter;
perror[1]=perror[2];
out_d[1]=out_d[2];
其中,Kp是比例系数,Kd是微分系数,perror[2]是本次信号采集计算出的误差,perror[1]是上次信号采集计算出的误差,center_conter是舵机的中心位置的计数值。
对于非线性PD算法,比例项输出out_p的计算方式如下:
if(perror[2]-20perror[2]20) out_p = 0;
else {
if(perror[2]20perror[2]100) out_p = perror[2]/2-10;
if(perror[2]-100perror[2]-20) out_p = perror[2]/2+10;
if(perror[2]=100) out_p = perror[2]*4/3-100;
if(perror[2]=-100) out_p = perror[2]*4/3+100;
}
微分部分的非线性也可以类似方式实现。
另外,对于PID调节经验,可以按照以下步骤进行参数调节:
1. 确定比例系数Kp:逐渐增大Kp直至系统出现振荡,然后逐渐减小Kp直至振荡消失,记录此时的Kp值,设定PID的比例系数Kp为当前值的60%~70%。
2. 确定积分时间常数Ti:设定一个较大的Ti,逐渐减小Ti直至系统出现振荡,然后逐渐增大Ti直至振荡消失,记录此时的Ti值,设定PID的积分时间常数Ti为当前值的150%~180%。
3. 确定微分时间常数Td:一般情况下可以将Td设为0,即转换为PI调节。如果需要设定Td,则可以采用与确定Kp相似的方法,取不振荡时其值的30%。
4. 进行系统空载和带载联调,微调PID参数,直到满足性能要求。
以上是基于标题内容的飞思卡尔光电组的解决方案,该方案可以应用于工业领域的光电测量、图像处理和自动控制等应用场景。
根据标题“飞思卡尔光电组原理图+PCB+应用笔记”,我们可以基于该标题内容提供以下解决方案。
飞思卡尔光电组是一个包括CCD传感器、按键电路、LCD液晶屏显示电路、电源部分、电机驱动、速度检测和控制器等组件的系统。该系统可以用于光电测量、图像处理、自动控制等工业领域的应用。
在该系统中,舵机和电机的PWM调速频率分别为300HZ和10KHZ。舵机的角度控制精确到1.5度,一般采用位置型PD控制方法进行控制。位置型PD控制的计算公式如下:
perror[2]=(width[2]-width[4])/2;
out_p=Kp*perror[2]/20;
out_d[2]=Kd*(perror[2]-perror[1])/20;
out[2]=out_p+out_d[2]+center_conter;
perror[1]=perror[2];
out_d[1]=out_d[2];
其中,Kp是比例系数,Kd是微分系数,perror[2]是本次信号采集计算出的误差,perror[1]是上次信号采集计算出的误差,center_conter是舵机的中心位置的计数值。
对于非线性PD算法,比例项输出out_p的计算方式如下:
if(perror[2]-20perror[2]20) out_p = 0;
else {
if(perror[2]20perror[2]100) out_p = perror[2]/2-10;
if(perror[2]-100perror[2]-20) out_p = perror[2]/2+10;
if(perror[2]=100) out_p = perror[2]*4/3-100;
if(perror[2]=-100) out_p = perror[2]*4/3+100;
}
微分部分的非线性也可以类似方式实现。
另外,对于PID调节经验,可以按照以下步骤进行参数调节:
1. 确定比例系数Kp:逐渐增大Kp直至系统出现振荡,然后逐渐减小Kp直至振荡消失,记录此时的Kp值,设定PID的比例系数Kp为当前值的60%~70%。
2. 确定积分时间常数Ti:设定一个较大的Ti,逐渐减小Ti直至系统出现振荡,然后逐渐增大Ti直至振荡消失,记录此时的Ti值,设定PID的积分时间常数Ti为当前值的150%~180%。
3. 确定微分时间常数Td:一般情况下可以将Td设为0,即转换为PI调节。如果需要设定Td,则可以采用与确定Kp相似的方法,取不振荡时其值的30%。
4. 进行系统空载和带载联调,微调PID参数,直到满足性能要求。
以上是基于标题内容的飞思卡尔光电组的解决方案,该方案可以应用于工业领域的光电测量、图像处理和自动控制等应用场景。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
『星¤空』
所在区域: 河北省-廊坊市
『星¤空』是一家专注于智能车航模电子DIY的公司。我们的团队由一群热爱电子DIY的学生组成,擅长领域包括四轴飞行器原理图、智能小车电路原理图、飞思卡尔主控板原理图、飞思卡尔光电组原理图、工业安全和智能家电等。
我们提供多种解决方案,包括8X8X8光立方电路方案设计(pcb+原理图+程序)、小四轴原理图和PCB+程序、智能小车原理图+PCB+程序、飞思卡尔光电组原理图+PCB+应用笔记,以及pcb原理图基本元件总库和Altium Designer视频学习资料等。
在『星¤空』,我们注重技术创新和质量保证。我们的团队经验丰富,能够为客户提供高质量的电子DIY解决方案。我们致力于为客户提供最新的技术和最优质的产品。
如果您对智能车航模电子DIY有兴趣或者有任何问题,欢迎随时联系我们。我们期待与您合作,共同推动智能车航模电子DIY的发展。