无尽虚空
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
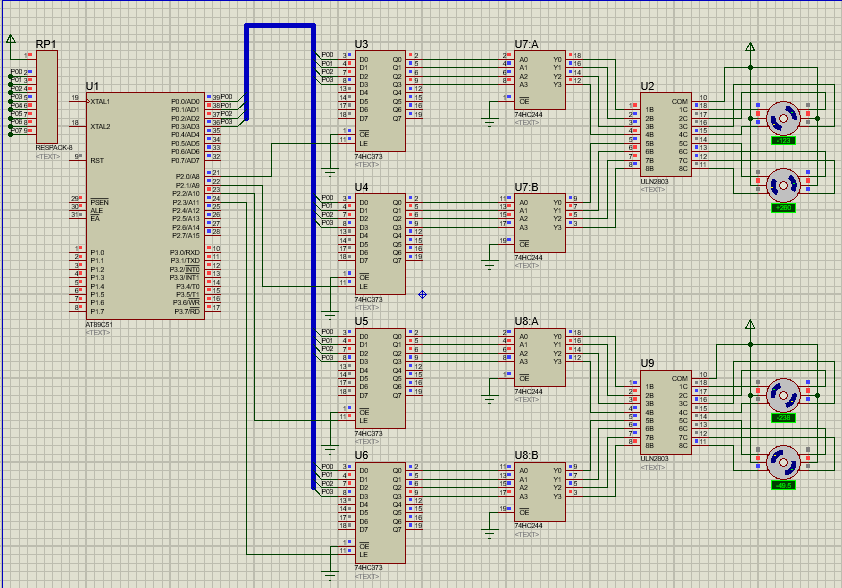
基于AT89C51单片机的四路电机控制,实现四肢可动的跳舞机器人。通过编程控制单片机的IO口,将电机与单片机连接,实现对电机的控制。需要准备四个直流电机,通过驱动电路与单片机相连。编写程序控制电机的运动,使用H桥驱动电路控制电机的正反转,PWM信号控制电机的速度。考虑机器人的结构设计和电源供应,进行测试和调试。适用于娱乐、教育等领域,为人们带来乐趣和启发。
解决方案:
基于AT89C51单片机的四路电机控制,可以实现四肢可动的跳舞机器人。通过编程控制单片机的IO口,将电机与单片机连接,实现对电机的控制。下面是具体的解决方案:
首先,需要准备四个直流电机,分别用于控制机器人的四肢。这些电机可以通过驱动电路与AT89C51单片机相连,以实现对电机的控制。
其次,需要编写程序来控制电机的运动。可以使用C语言编程,通过单片机的IO口输出控制信号,控制电机的转动方向和速度。可以根据需要编写不同的舞蹈动作,通过控制电机的转动来实现机器人的跳舞动作。
在编写程序时,需要考虑到电机的驱动方式。可以选择使用H桥驱动电路来控制电机的正反转,以及PWM信号来控制电机的速度。通过调整PWM信号的占空比,可以控制电机的转速。
另外,为了确保机器人的稳定性和安全性,还需要考虑机器人的结构设计和电源供应。机器人的结构设计应该合理,能够支撑起机器人的四肢,并且保证机器人在跳舞过程中的稳定性。电源供应可以选择使用锂电池或者直流电源适配器,以提供足够的电能供给机器人的运动。
最后,需要进行测试和调试,确保机器人的跳舞动作符合预期。可以通过连接电脑,通过串口通信来监控机器人的运动状态,并进行调试和优化。
通过以上的解决方案,基于AT89C51单片机的四路电机控制,可以实现四肢可动的跳舞机器人。这样的机器人可以应用于娱乐、教育等领域,为人们带来乐趣和启发。
基于AT89C51单片机的四路电机控制,可以实现四肢可动的跳舞机器人。通过编程控制单片机的IO口,将电机与单片机连接,实现对电机的控制。下面是具体的解决方案:
首先,需要准备四个直流电机,分别用于控制机器人的四肢。这些电机可以通过驱动电路与AT89C51单片机相连,以实现对电机的控制。
其次,需要编写程序来控制电机的运动。可以使用C语言编程,通过单片机的IO口输出控制信号,控制电机的转动方向和速度。可以根据需要编写不同的舞蹈动作,通过控制电机的转动来实现机器人的跳舞动作。
在编写程序时,需要考虑到电机的驱动方式。可以选择使用H桥驱动电路来控制电机的正反转,以及PWM信号来控制电机的速度。通过调整PWM信号的占空比,可以控制电机的转速。
另外,为了确保机器人的稳定性和安全性,还需要考虑机器人的结构设计和电源供应。机器人的结构设计应该合理,能够支撑起机器人的四肢,并且保证机器人在跳舞过程中的稳定性。电源供应可以选择使用锂电池或者直流电源适配器,以提供足够的电能供给机器人的运动。
最后,需要进行测试和调试,确保机器人的跳舞动作符合预期。可以通过连接电脑,通过串口通信来监控机器人的运动状态,并进行调试和优化。
通过以上的解决方案,基于AT89C51单片机的四路电机控制,可以实现四肢可动的跳舞机器人。这样的机器人可以应用于娱乐、教育等领域,为人们带来乐趣和启发。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
无尽虚空
所在区域: 全国
无尽虚空是一家专注于工业领域的公司,我们擅长于单片机、声音传感器、电源设计、红外遥控、智能插座等领域。我们提供多种解决方案,包括基于AT89C51单片机制作跳舞机器人、基于单片机制作10BitDA正弦信号发生器、基于单片机控制大屏LCD汉字显示可滚动等。此外,我们还提供LMD18200直流电机驱动器PCB+原理图资料、LM393声音传感器PCB+原理图资料等相关资料。我们的产品和解决方案广泛应用于自动化控制、工业安全、智能家电等领域。无尽虚空致力于为客户提供高质量的技术支持和解决方案,我们的团队拥有丰富的经验和专业知识,能够满足客户的需求。