f167355
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
KEA128是一款强大的主控芯片,可用于读取MPU6050六轴传感器数据并进行姿态解算,计算物体的俯仰角。通过连接KEA128和MPU6050,使用姿态解算算法,可以准确测量物体的俯仰角。这个解决方案适用于飞行器姿态控制、机器人导航等工业应用,为工程师提供了可靠的俯仰角测量工具。
解决方案:
KEA128是一款强大的主控芯片,可以用于读取MPU6050六轴传感器的数据,并进行姿态解算,以求出俯仰角。下面是一个基于KEA128的解决方案:
首先,需要连接KEA128和MPU6050。KEA128可以通过I2C总线与MPU6050进行通信。通过I2C总线,KEA128可以读取MPU6050的加速度和陀螺仪数据。
接下来,需要对读取到的数据进行处理。MPU6050的加速度和陀螺仪数据可以用于计算姿态角。姿态角是描述物体在空间中的方向的角度。在这个解决方案中,我们主要关注俯仰角。
俯仰角是描述物体绕X轴旋转的角度。为了计算俯仰角,我们可以使用加速度计的数据。加速度计可以测量物体在X轴上的加速度,通过对加速度计数据进行处理,可以得到俯仰角。
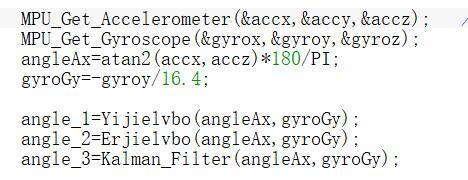
在KEA128上,可以使用数学库或者姿态解算算法来计算俯仰角。这些算法可以根据加速度计的数据来估计物体的姿态角。一种常用的算法是卡尔曼滤波算法,它可以通过融合加速度计和陀螺仪的数据来得到更准确的姿态角。
通过KEA128读取MPU6050的数据,并使用姿态解算算法计算俯仰角,可以实现对物体俯仰角的准确测量。这对于许多工业应用来说是非常重要的,比如飞行器的姿态控制、机器人的导航等。
总结起来,KEA128可以作为主控芯片,通过读取MPU6050的数据,并使用姿态解算算法计算俯仰角。这个解决方案可以应用于各种工业领域,为工程师们提供了一个可靠的工具来测量物体的俯仰角。
KEA128是一款强大的主控芯片,可以用于读取MPU6050六轴传感器的数据,并进行姿态解算,以求出俯仰角。下面是一个基于KEA128的解决方案:
首先,需要连接KEA128和MPU6050。KEA128可以通过I2C总线与MPU6050进行通信。通过I2C总线,KEA128可以读取MPU6050的加速度和陀螺仪数据。
接下来,需要对读取到的数据进行处理。MPU6050的加速度和陀螺仪数据可以用于计算姿态角。姿态角是描述物体在空间中的方向的角度。在这个解决方案中,我们主要关注俯仰角。
俯仰角是描述物体绕X轴旋转的角度。为了计算俯仰角,我们可以使用加速度计的数据。加速度计可以测量物体在X轴上的加速度,通过对加速度计数据进行处理,可以得到俯仰角。
在KEA128上,可以使用数学库或者姿态解算算法来计算俯仰角。这些算法可以根据加速度计的数据来估计物体的姿态角。一种常用的算法是卡尔曼滤波算法,它可以通过融合加速度计和陀螺仪的数据来得到更准确的姿态角。
通过KEA128读取MPU6050的数据,并使用姿态解算算法计算俯仰角,可以实现对物体俯仰角的准确测量。这对于许多工业应用来说是非常重要的,比如飞行器的姿态控制、机器人的导航等。
总结起来,KEA128可以作为主控芯片,通过读取MPU6050的数据,并使用姿态解算算法计算俯仰角。这个解决方案可以应用于各种工业领域,为工程师们提供了一个可靠的工具来测量物体的俯仰角。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
f167355
所在区域: 全国
f167355是一家专注于工业领域的公司,我们擅长于提供各类解决方案。我们的核心产品是KEA128读取MPU6050角度数据和姿态解算。通过使用KEA128芯片,我们能够准确读取MPU6050传感器的角度数据,并进行姿态解算,从而帮助客户实现精准的姿态控制和监测。
我们的解决方案广泛应用于工业自动化、机器人、无人机等领域。无论是在生产线上的自动化控制,还是在机器人和无人机的导航和稳定控制中,我们的产品都能够提供可靠的数据支持和精确的姿态解算。
我们的团队由一群经验丰富的工程师组成,他们具备深厚的技术功底和丰富的行业经验。我们致力于为客户提供高质量的产品和解决方案,并与客户紧密合作,根据客户的需求进行定制化开发。
我们的成功案例包括在工业自动化领域帮助客户实现高效生产线的自动化控制,以及在机器人和无人机领域帮助客户实现精确的导航和稳定控制。我们的产品和解决方案得到了客户的一致好评,并在市场上取得了良好的口碑。
如果您对我们的产品和解决方案感兴趣,欢迎随时联系我们,我们将竭诚为您提供优质的服务和支持。