heroxu
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
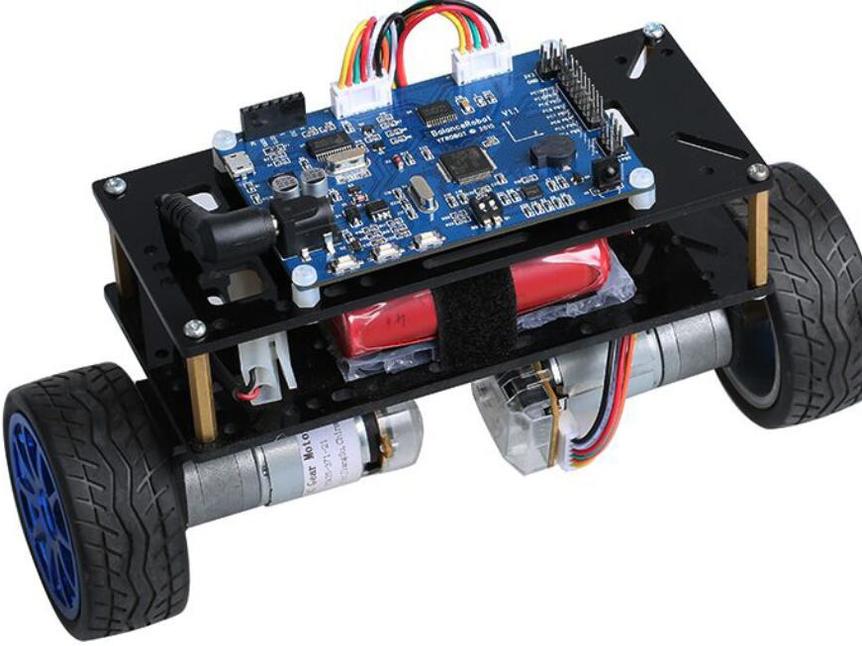
我们将通过以下步骤制作基于STM32控制的双轮自平衡智能车:准备工作、硬件连接、软件设置、实验步骤、调试和优化。平衡车控制板集成了所需资源,制作过程简单便捷。实验例程指引深入研究控制原理,并进行调试和优化。该平衡车具有灵活、便捷和节能等特点,适用于工业领域的各种应用场景。请参考附件中的资料获取更详细信息和指导。
我们将通过以下步骤来制作一个基于STM32控制的双轮自平衡智能车:
1. 准备工作:
- 获取BalanceRobot(Balancs)平衡车控制板,该控制板集成了制作平衡车所需的所有资源,包括MPU6050和电机驱动模块。
- 安装平衡车支架,并将控制板安装在支架上。
- 连接电源,确保控制板正常工作。
2. 硬件连接:
- 根据BalanceRobot(Balancs)V1.1使用手册.pdf中的指引,将各个传感器和执行器正确连接到控制板上。
- 确保连接的稳固可靠,避免松动或接触不良的情况。
3. 软件设置:
- 下载并安装手机app,该app将用于控制平衡车的运动。
- 根据实验例程中的指引,进行软件设置和配置,确保平衡车与手机app之间的通信正常。
4. 实验步骤:
- 根据实验例程中的实验步骤,逐步进行以下实验:
- 实验1: KEYLED
- 实验2: BEEP
- 实验3: 红外遥控实验
- 实验4: 电机驱动与编码器
- 实验5: MPU6050-DMP无校准
- 实验6: 蓝牙串口实验
- 实验7: 小车站立
- 实验8: 蓝牙控制小车行走
5. 调试和优化:
- 在进行实验的过程中,可能会遇到一些问题和挑战。根据实验例程中的指引,进行调试和优化,确保平衡车的控制和运动稳定。
通过以上步骤,我们可以制作一个基于STM32控制的双轮自平衡智能车。这款平衡车控制板(BalanceRobot(Balancs))集成了所需的资源,使制作过程更加简单和便捷。同时,通过实验例程的指引,我们可以深入研究两轮平衡车的控制原理,并进行相应的调试和优化。这款平衡车具有灵活、便捷和节能等特点,适用于工业领域的各种应用场景。
请参考附件中的资料,包括手机app、使用手册、平衡原理和实验例程,以获取更详细的信息和指导。
1. 准备工作:
- 获取BalanceRobot(Balancs)平衡车控制板,该控制板集成了制作平衡车所需的所有资源,包括MPU6050和电机驱动模块。
- 安装平衡车支架,并将控制板安装在支架上。
- 连接电源,确保控制板正常工作。
2. 硬件连接:
- 根据BalanceRobot(Balancs)V1.1使用手册.pdf中的指引,将各个传感器和执行器正确连接到控制板上。
- 确保连接的稳固可靠,避免松动或接触不良的情况。
3. 软件设置:
- 下载并安装手机app,该app将用于控制平衡车的运动。
- 根据实验例程中的指引,进行软件设置和配置,确保平衡车与手机app之间的通信正常。
4. 实验步骤:
- 根据实验例程中的实验步骤,逐步进行以下实验:
- 实验1: KEYLED
- 实验2: BEEP
- 实验3: 红外遥控实验
- 实验4: 电机驱动与编码器
- 实验5: MPU6050-DMP无校准
- 实验6: 蓝牙串口实验
- 实验7: 小车站立
- 实验8: 蓝牙控制小车行走
5. 调试和优化:
- 在进行实验的过程中,可能会遇到一些问题和挑战。根据实验例程中的指引,进行调试和优化,确保平衡车的控制和运动稳定。
通过以上步骤,我们可以制作一个基于STM32控制的双轮自平衡智能车。这款平衡车控制板(BalanceRobot(Balancs))集成了所需的资源,使制作过程更加简单和便捷。同时,通过实验例程的指引,我们可以深入研究两轮平衡车的控制原理,并进行相应的调试和优化。这款平衡车具有灵活、便捷和节能等特点,适用于工业领域的各种应用场景。
请参考附件中的资料,包括手机app、使用手册、平衡原理和实验例程,以获取更详细的信息和指导。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
heroxu
所在区域: 全国
Heroxu是一家专注于智能车、自动化控制和智能家电领域的公司。我们拥有一支技术精湛的团队,擅长开发创新的解决方案,为客户提供高质量的产品和服务。
在智能车领域,我们研发了一款基于STM32控制的双轮自平衡智能车。该智能车具有稳定性强、操控灵活、智能化程度高等特点。我们不仅提供智能车的制作过程全解,还提供了详细的制作过程视频,帮助客户快速上手。
在自动化控制领域,我们利用arduino驱动光立方,实现了自动化控制的功能。通过动画演示视频和制作过程详解,我们向客户展示了如何利用arduino实现光立方的驱动,帮助客户了解自动化控制的原理和应用。
此外,我们还在智能家电领域有着丰富的经验和技术实力。我们致力于开发智能家电产品,提供智能化的解决方案,使家庭生活更加便捷和舒适。
我们的团队拥有丰富的行业经验和专业知识,能够根据客户的需求提供定制化的解决方案。我们以客户满意为目标,不断创新和进步,为客户提供最优质的产品和服务。
如果您对我们的产品和解决方案感兴趣,欢迎随时联系我们,我们将竭诚为您服务。