Yooth.Wang
所在地区:
四川省-成都市
首页
服务/硬件产品
行业解决方案
案例
方案概述:
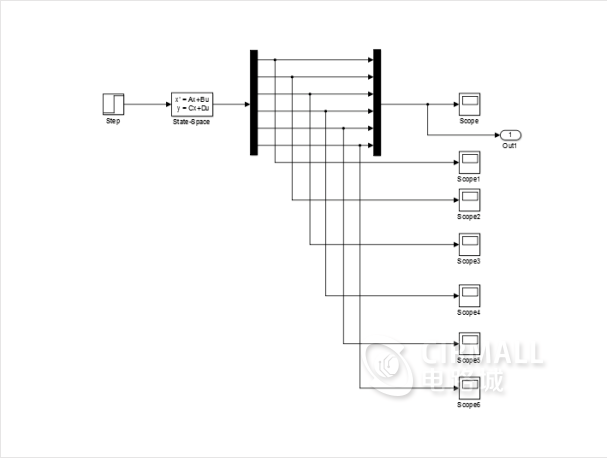
本文通过应用现代控制理论和Simulink仿真软件,解决了倒立摆控制问题。首先建立了倒立摆的数学模型,并通过线性化得到了系统的状态空间模型。然后应用现代控制理论分析了倒立摆的稳定性、能控性和能观性。接着采用二次型最优控制理论研究了倒立摆的控制问题,并通过状态反馈极点配置的方法获得了较好的控制效果。最后通过Matlab仿真验证了优化后系统的响应曲线,结果显示优化后的系统具有更快的响应速度、减少的超调量以及减少的稳定时间和上升时间,系统的动态性能和静态性能明显优于未优化的控制效果。
本文以“现代控制理论的倒立摆系统设计与Simulink仿真”为标题,通过应用现代控制理论和Simulink仿真软件,解决了倒立摆控制问题。首先,利用拉格朗日方程建立了二级倒立摆的数学模型,并通过线性化得到了系统的状态空间模型。然后,应用现代控制理论分析了倒立摆的稳定性、能控性和能观性。接着,采用二次型最优控制理论研究了倒立摆的控制问题,并运用状态反馈极点配置的方法获得了较好的控制效果。最后,通过Matlab仿真验证了优化后系统的响应曲线,结果显示经过极点配置算法优化后的系统具有更快的响应速度、明显减少的超调量以及减少的稳定时间和上升时间,系统的动态性能和静态性能明显优于未优化的控制效果。
本文的主要任务是研究旋转倒立摆的控制问题。首先,摆杆由摆臂带动摆杆摆动,摆杆在自然下垂状态下摆动角达到或超过-60±60°。其次,通过手动拨动摆杆,记录能够使其做圆周运动的角度。最后,在摆杆自由状态下,手动拉开一定角度并撤掉力的作用,要求摆杆在运动过程中来回运动的时间不超过5秒,并且旋转臂的旋转角度不大于90度。
本论文主要包括以下章节:第一章简要介绍了倒立摆的结构、发展和意义;第二章应用牛顿第二定律建立了一级倒立摆系统的数学模型,并对系统进行了线性化处理;第三章介绍了状态反馈极点配置的控制方法,包括状态方程的设计、极点配置的分析和反馈系数的确定过程;第四章通过仿真实验,根据仿真结果选择了最优的极点配置,其中极点距离原点的距离越远,系统的控制速度越快。
通过本文的研究,我们成功设计了现代控制理论下的倒立摆系统,并通过Simulink仿真验证了系统的控制效果,为倒立摆控制问题提供了一种有效的解决方案。
本文的主要任务是研究旋转倒立摆的控制问题。首先,摆杆由摆臂带动摆杆摆动,摆杆在自然下垂状态下摆动角达到或超过-60±60°。其次,通过手动拨动摆杆,记录能够使其做圆周运动的角度。最后,在摆杆自由状态下,手动拉开一定角度并撤掉力的作用,要求摆杆在运动过程中来回运动的时间不超过5秒,并且旋转臂的旋转角度不大于90度。
本论文主要包括以下章节:第一章简要介绍了倒立摆的结构、发展和意义;第二章应用牛顿第二定律建立了一级倒立摆系统的数学模型,并对系统进行了线性化处理;第三章介绍了状态反馈极点配置的控制方法,包括状态方程的设计、极点配置的分析和反馈系数的确定过程;第四章通过仿真实验,根据仿真结果选择了最优的极点配置,其中极点距离原点的距离越远,系统的控制速度越快。
通过本文的研究,我们成功设计了现代控制理论下的倒立摆系统,并通过Simulink仿真验证了系统的控制效果,为倒立摆控制问题提供了一种有效的解决方案。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
Yooth.Wang
所在区域: 四川省-成都市
Yooth.Wang是一家专注于电子产品开发的公司,提供电路设计、PCB设计和DSP嵌入式系统设计等服务。公司擅长领域包括智能家居、51单片机、工业控制、仿生系统、MATLAB编程等。我们致力于为客户提供高质量的解决方案。
我们的解决方案涵盖了多个领域。例如,我们设计了仿生机械手掌控制系统,借助现代控制理论实现了倒立摆系统的设计与simulink仿真。此外,我们还进行了光波分复用系统的仿真与论文研究,以及高效开关电源设计和室内空气质量检测系统设计等。
在控制领域,我们基于PSO算法设计了PID控制器,并进行了仿真研究。此外,我们还开发了红外感应智能卫生间仿真电路及代码,以及基于LabVIEW的音频信号采集分析系统。
除了以上解决方案,我们还提供了其他多项服务,如植物发电太阳能充电器仿真与设计、医院点滴无线监控设计、LED驱动电源设计等。
Yooth.Wang致力于为客户提供创新的解决方案,我们的团队拥有丰富的经验和专业知识。无论是在产品开发还是在技术支持方面,我们都能够满足客户的需求。如果您有任何关于电子产品开发的需求,欢迎与我们联系。