xiao12mao
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
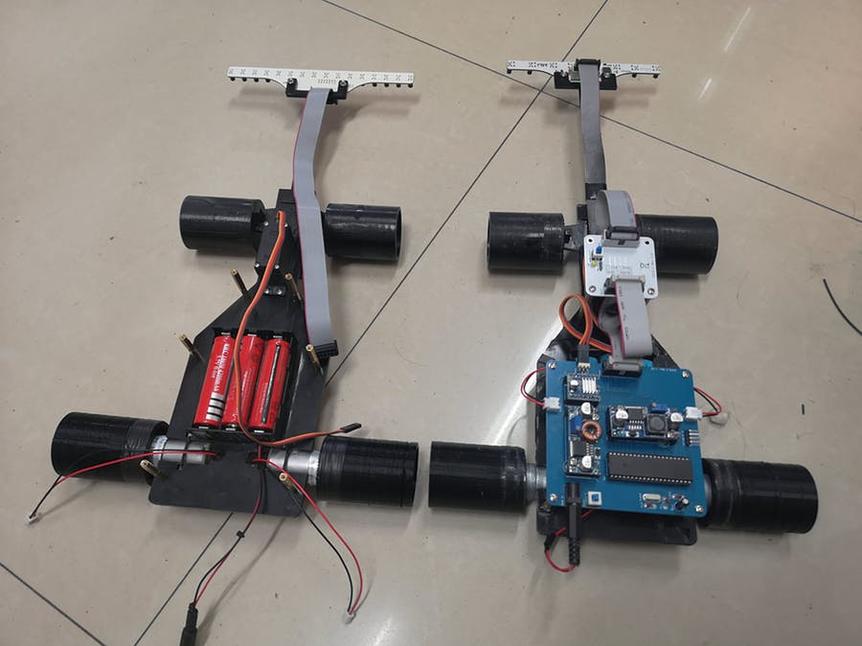
我们提供一种基于PID线跟随和伺服转向技术的智能车辆控制解决方案。该方案使用STC15W4K32S4 MCU和一系列硬件组件和软件应用程序。通过使用这些组件,我们能够实现智能车辆的控制和感知功能。我们使用KeilμVisionC51IDE和STC-ISP MCU Flasher来开发和烧录MCU的固件,并使用激光切割机和3D打印机制造车身和其他零部件。PID控制算法是该解决方案的核心,它可以根据传感器反馈的信息来调整车辆的转向和速度,实现准确的线路跟随。通过这种技术,智能车辆可以在复杂的线路上自动导航和避障,适用于工业领域的自动化仓储、物流运输和智能巡检等应用。
我们提供一种解决方案,使用PID线跟随和伺服转向技术来实现智能车辆的控制。该方案基于STC15W4K32S4 MCU,并使用了一系列硬件组件和软件应用程序。
硬件组件包括STC15W4K32S4 MCU、5A DC-DC可调电源模块、TB6612FNG双通道电机驱动器、直流电机、MG996R数字伺服、18650电池和SEN2020 8路红外传感器。这些组件提供了智能车辆所需的控制和感知功能。
软件应用程序方面,我们使用KeilμVisionC51IDE和STC-ISP MCU Flasher来开发和烧录MCU的固件。这些工具提供了一个可靠的开发环境,使我们能够编写和调试控制算法。
在制造方面,我们可以使用激光切割机和3D打印机来制造车身和其他零部件。此外,我们还需要烙铁等手动工具来进行组装和调试。
该解决方案的核心是PID控制算法。PID控制是一种常用的反馈控制算法,可以根据传感器反馈的信息来调整车辆的转向和速度,使其能够准确地跟随黑/白线。
具体实现过程如下:首先,通过SEN2020红外传感器检测车辆下方的黑/白线。然后,将传感器的反馈信号输入到STC15W4K32S4 MCU中进行处理。MCU使用PID算法来计算出车辆应该采取的转向和速度控制信号。最后,通过TB6612FNG电机驱动器控制直流电机和MG996R数字伺服,实现车辆的转向和速度控制。
通过这种PID线跟随和伺服转向技术,智能车辆能够在复杂的线路上准确地跟随黑/白线,实现自动导航和避障功能。这种解决方案可以应用于自动化仓储、物流运输、智能巡检等工业领域,提高工作效率和安全性。
以上是基于标题和提供的硬件组件的解决方案,通过PID线跟随和伺服转向技术实现智能车辆的控制。
硬件组件包括STC15W4K32S4 MCU、5A DC-DC可调电源模块、TB6612FNG双通道电机驱动器、直流电机、MG996R数字伺服、18650电池和SEN2020 8路红外传感器。这些组件提供了智能车辆所需的控制和感知功能。
软件应用程序方面,我们使用KeilμVisionC51IDE和STC-ISP MCU Flasher来开发和烧录MCU的固件。这些工具提供了一个可靠的开发环境,使我们能够编写和调试控制算法。
在制造方面,我们可以使用激光切割机和3D打印机来制造车身和其他零部件。此外,我们还需要烙铁等手动工具来进行组装和调试。
该解决方案的核心是PID控制算法。PID控制是一种常用的反馈控制算法,可以根据传感器反馈的信息来调整车辆的转向和速度,使其能够准确地跟随黑/白线。
具体实现过程如下:首先,通过SEN2020红外传感器检测车辆下方的黑/白线。然后,将传感器的反馈信号输入到STC15W4K32S4 MCU中进行处理。MCU使用PID算法来计算出车辆应该采取的转向和速度控制信号。最后,通过TB6612FNG电机驱动器控制直流电机和MG996R数字伺服,实现车辆的转向和速度控制。
通过这种PID线跟随和伺服转向技术,智能车辆能够在复杂的线路上准确地跟随黑/白线,实现自动导航和避障功能。这种解决方案可以应用于自动化仓储、物流运输、智能巡检等工业领域,提高工作效率和安全性。
以上是基于标题和提供的硬件组件的解决方案,通过PID线跟随和伺服转向技术实现智能车辆的控制。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
xiao12mao
所在区域: 全国
公司简介:
xiao12mao是一家专注于智能家居和物联网领域的公司。我们擅长开发各种传感器技术,包括湿度传感器、温度传感器、超声波传感器、红外遥控、烟雾传感器等。同时,我们也致力于开发智能家电、智能车、智能手表、智能锁等智能产品,以满足用户对智能化生活的需求。
我们提供多种解决方案,包括DIY指南、自动化控制、工业安全、智能家居控制等。我们的方案涵盖了各个领域,例如空调伴侣、自动浇水系统、双向数字访客计数器、烟雾报警器改造等。我们还提供了一系列基于Arduino、Raspberry Pi等平台的教程和项目,帮助用户实现自己的创意和想法。
我们的团队拥有丰富的经验和专业知识,能够为客户提供高质量的产品和解决方案。我们注重技术创新和产品质量,致力于为用户提供更智能、更便捷的生活体验。
xiao12mao,让科技改变生活!