zhimingmin
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
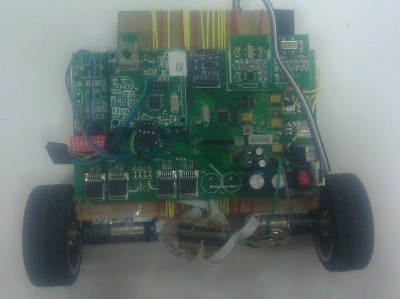
该解决方案基于上位机体感识别和下位机两轮自平衡部分。上位机使用微软的Kinect摄像头,通过输出景深图像、骨骼数据和RGB数据实现体感识别。下位机使用陀螺仪和三轴加速度采样信号,通过凯尔曼滤波进行数据融合,实现角度和角速度计算。通过几个PI调节器实现3闭环控制,包括姿态、速度和位置控制。整个系统通过WIFI传输数据,实现远程控制和监测。该解决方案可实现体感控制的两轮自平衡小车,适用于不同地面上的平衡行驶和动作识别。
解决方案:
该两轮自平衡小车的设计主要基于上位机体感识别和下位机两轮自平衡部分。上位机使用微软的Kinect摄像头,通过输出景深图像、骨骼数据和RGB数据来实现体感识别。景深数据可以反映图像深度,通过图像处理可以得到骨骼数据。RGB数据直接显示,并进行简单的动作识别。数据通过WIFI传输,使用亚信提供的WIFI转串口方案。
下位机使用陀螺仪和三轴加速度采样信号,通过凯尔曼滤波进行数据融合,计算出角度和角速度。然后使用几个PI调节器实现3闭环控制,包括姿态、速度和位置控制。具体的实现细节可以在论文中找到。
整个系统的框图如下所示:
[系统框图]
在实际应用中,可以使用如下的步骤来设计和制作该两轮自平衡小车:
1. 硬件设计:选择合适的微软Kinect摄像头和陀螺仪、加速度传感器等硬件设备,并进行电路设计和布局。
2. 上位机体感识别:使用微软提供的SDK和图像处理算法,获取景深图像和骨骼数据,并进行动作识别。
3. 下位机两轮自平衡部分:通过陀螺仪和加速度传感器采集角度和角速度数据,使用凯尔曼滤波进行数据融合,然后通过PI调节器实现姿态、速度和位置控制。
4. 系统集成:将上位机和下位机进行连接,通过WIFI传输数据,实现远程控制和监测。
通过以上的设计和实现,可以实现体感控制的两轮自平衡小车。该小车可以在不同的地面上平衡行驶,并且可以通过体感识别实现远程控制和动作识别功能。
以上是对体感控制两轮自平衡小车设计的解决方案,希望对您有所帮助。如有更多问题,请随时提问。
该两轮自平衡小车的设计主要基于上位机体感识别和下位机两轮自平衡部分。上位机使用微软的Kinect摄像头,通过输出景深图像、骨骼数据和RGB数据来实现体感识别。景深数据可以反映图像深度,通过图像处理可以得到骨骼数据。RGB数据直接显示,并进行简单的动作识别。数据通过WIFI传输,使用亚信提供的WIFI转串口方案。
下位机使用陀螺仪和三轴加速度采样信号,通过凯尔曼滤波进行数据融合,计算出角度和角速度。然后使用几个PI调节器实现3闭环控制,包括姿态、速度和位置控制。具体的实现细节可以在论文中找到。
整个系统的框图如下所示:
[系统框图]
在实际应用中,可以使用如下的步骤来设计和制作该两轮自平衡小车:
1. 硬件设计:选择合适的微软Kinect摄像头和陀螺仪、加速度传感器等硬件设备,并进行电路设计和布局。
2. 上位机体感识别:使用微软提供的SDK和图像处理算法,获取景深图像和骨骼数据,并进行动作识别。
3. 下位机两轮自平衡部分:通过陀螺仪和加速度传感器采集角度和角速度数据,使用凯尔曼滤波进行数据融合,然后通过PI调节器实现姿态、速度和位置控制。
4. 系统集成:将上位机和下位机进行连接,通过WIFI传输数据,实现远程控制和监测。
通过以上的设计和实现,可以实现体感控制的两轮自平衡小车。该小车可以在不同的地面上平衡行驶,并且可以通过体感识别实现远程控制和动作识别功能。
以上是对体感控制两轮自平衡小车设计的解决方案,希望对您有所帮助。如有更多问题,请随时提问。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
zhimingmin
所在区域: 全国
公司简介:
zhimingmin是一家专注于工业领域的技术公司。我们擅长超声波传感器、停车辅助系统、自助停车、硬件设计、无线通信、音频解决方案、智能手表等领域。我们提供多种解决方案,包括应用于汽车盲区检测或停车辅助设计、EL灯片专用驱动器硬件设计、射频433MHz单向无线通信源码及讲解、专业气象站服务站-空气质量识别仪硬件设计等。我们还提供各种电路图、源码和设计资料,如MT6260的智能手表原理图+PCB源文件、幸运转盘设计方案等。我们的产品和解决方案广泛应用于智能制造、智慧农业、自动化控制、工业安全、智能家电、土壤监测等领域。我们致力于为客户提供高质量的技术支持和解决方案,帮助他们实现业务目标。