josephli
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
倒立摆姿态精确调整与控制系统是一种创新的回收火箭方案,利用倒立摆原理实现火箭回收降落过程中的姿态调整。系统采用高性能伺服系统和动量轮,通过转动惯量守恒原理精确调整火箭姿态。核心部分是两个高速旋转的动量轮,垂直于火箭轴线方向,确保在任意姿态下恢复火箭姿态。主控系统采用STM32F103作为MCU,配备SWD接口和IAP模式进行无线系统烧录。动量轮驱动模块采用瑞士Maxon的直流无刷电机,满足快速控制响应和高速控制需求。无线通讯模块用于回传状态数据,优化控制算法和模型。动量轮快速制动模块采用GOTECK的金属齿轮舵机,实现瞬时极大动量转变。系统配备姿态仪AHRS功能架构图和作品实物图展示。该系统提高回收火箭稳定性和精确性,为火箭回收技术发展做出重要贡献。
解决方案:
倒立摆姿态精确调整与控制系统是一种创新的回收火箭方案,它利用倒立摆原理来实现火箭回收降落过程中的姿态调整。该系统采用STM32F103作为主控,通过转动惯量守恒原理,利用高性能伺服系统和动量轮来实现对火箭姿态的精确调整。
系统的核心部分是两个高速旋转的动量轮,它们垂直于火箭轴线方向,并且彼此垂直,以确保在任意姿态下都能恢复火箭的姿态。主控系统采用STM32F103作为MCU,并配备SWD接口,方便前期程序调试。同时,系统还采用了IAP模式进行无线系统烧录,以便在火箭模型实测时进行程序修改。
动量轮驱动模块是系统中的关键部分,它用于调整系统的姿态。为了满足快速控制响应和高速控制的要求,选择了瑞士Maxon的直流无刷电机251601外转子马达作为动量轮的主要驱动装置。这款电机具有良好的动态响应性能和足够大的转动扭矩,能够满足系统的转动需求。
无线通讯模块用于系统调试过程中火箭模型状态数据的回传,以便快速高效地调试空中控制系统。通过蓝牙无线模块传回的状态数据,可以适当修改控制算法和修正控制模型,从而提高系统的稳定性和精确性。
动量轮快速制动模块相当于一个刹车装置,它能够快速实现动量轮的卡顿刹车,从而实现瞬时极大动量的转变,从而大幅度调整火箭的姿态。为了实现这一功能,选择了GOTECK的金属齿轮舵机GS-9025MG。
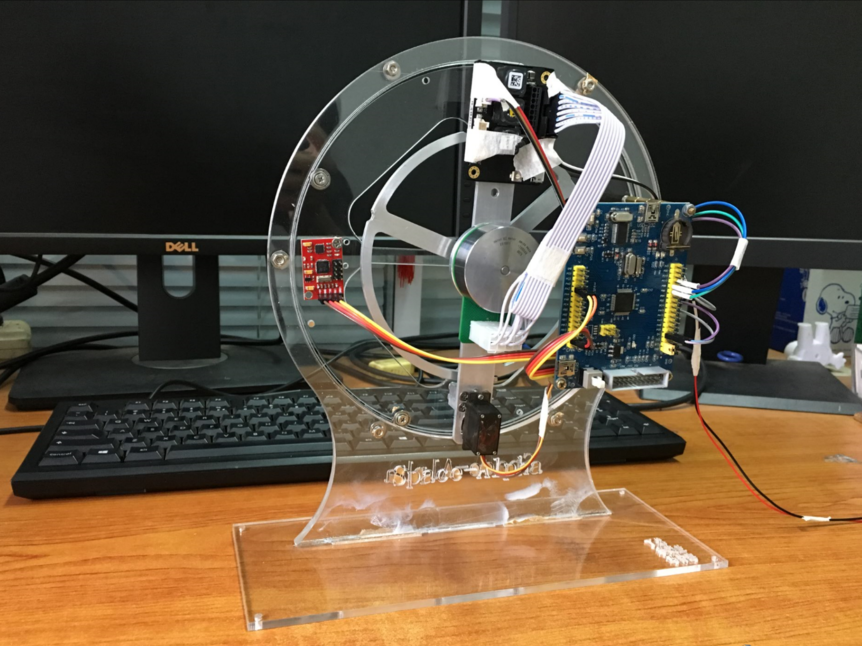
最后,系统还配备了姿态仪AHRS功能架构图,以及作品实物图展示,这些图示能够直观地展示系统的结构和外观。
通过倒立摆姿态精确调整与控制系统,可以实现火箭回收降落过程中的姿态调整,提高回收火箭的稳定性和精确性。该系统的设计和实现为火箭回收技术的发展做出了重要贡献。
倒立摆姿态精确调整与控制系统是一种创新的回收火箭方案,它利用倒立摆原理来实现火箭回收降落过程中的姿态调整。该系统采用STM32F103作为主控,通过转动惯量守恒原理,利用高性能伺服系统和动量轮来实现对火箭姿态的精确调整。
系统的核心部分是两个高速旋转的动量轮,它们垂直于火箭轴线方向,并且彼此垂直,以确保在任意姿态下都能恢复火箭的姿态。主控系统采用STM32F103作为MCU,并配备SWD接口,方便前期程序调试。同时,系统还采用了IAP模式进行无线系统烧录,以便在火箭模型实测时进行程序修改。
动量轮驱动模块是系统中的关键部分,它用于调整系统的姿态。为了满足快速控制响应和高速控制的要求,选择了瑞士Maxon的直流无刷电机251601外转子马达作为动量轮的主要驱动装置。这款电机具有良好的动态响应性能和足够大的转动扭矩,能够满足系统的转动需求。
无线通讯模块用于系统调试过程中火箭模型状态数据的回传,以便快速高效地调试空中控制系统。通过蓝牙无线模块传回的状态数据,可以适当修改控制算法和修正控制模型,从而提高系统的稳定性和精确性。
动量轮快速制动模块相当于一个刹车装置,它能够快速实现动量轮的卡顿刹车,从而实现瞬时极大动量的转变,从而大幅度调整火箭的姿态。为了实现这一功能,选择了GOTECK的金属齿轮舵机GS-9025MG。
最后,系统还配备了姿态仪AHRS功能架构图,以及作品实物图展示,这些图示能够直观地展示系统的结构和外观。
通过倒立摆姿态精确调整与控制系统,可以实现火箭回收降落过程中的姿态调整,提高回收火箭的稳定性和精确性。该系统的设计和实现为火箭回收技术的发展做出了重要贡献。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
josephli
所在区域: 全国
Josephli是一家专注于通信协议、单片机、仿真、射频模块、传感器、智能车、智能家居等领域的公司。我们擅长开发各种基于51单片机的产品和解决方案,包括单片机仿真、电机控制、智能家居系统、报警系统、远程监控等。我们还提供风速计、自动售水机、TPMS轮胎压力显示、自动遮阳罩等产品和解决方案。我们的团队拥有丰富的经验和专业知识,能够为客户提供高质量的技术支持和解决方案。我们的产品和解决方案已经在多个行业得到了广泛应用,包括通信、智能家居、工业控制等。我们致力于为客户提供创新的技术和可靠的产品,帮助他们实现业务目标。如果您对我们的公司和产品感兴趣,欢迎与我们联系。