MartinR
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
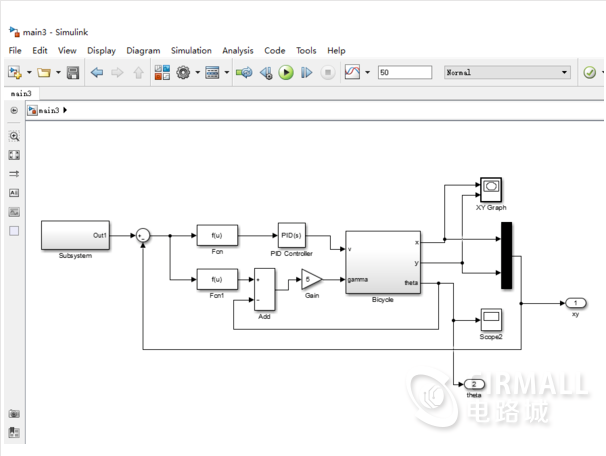
我们提供基于Matlab的机器人小车路线自动PID追踪解决方案。通过激光传感器、摄像头或编码器获取小车位置信息,并使用PID控制器进行设计和调试。定义目标路线后,将实时位置数据与目标路线比较,计算误差值,并通过调整输出信号控制小车运动。最后,将输出信号转化为控制指令,实现自动追踪。这种方案提高了小车的自动化程度,减少人工干预,提高生产效率,并实现精确的路线追踪。
解决方案:
在工业领域中,机器人的自动控制是一个重要的研究方向。针对机器人小车的路线追踪问题,我们可以采用基于Matlab的PID控制算法进行设计。
首先,我们需要获取机器人小车的位置信息。可以通过激光传感器、摄像头或者编码器等设备来获取小车的实时位置数据。这些数据可以作为PID控制算法的输入。
接下来,我们需要设计PID控制器。PID控制器是一种经典的控制算法,它可以根据当前的误差值来调整输出信号,使得系统能够快速、稳定地达到期望的目标。在Matlab中,可以使用PID控制器工具箱来设计和调试PID控制器。
然后,我们需要定义小车的目标路线。可以通过预先设定的路径或者通过遥控器手动控制小车来获取目标路线。目标路线可以作为PID控制算法的参考输入。
接下来,我们将实时获取的小车位置数据和目标路线进行比较,计算出当前的误差值。然后,将误差值作为PID控制器的输入,通过调整输出信号来控制小车的运动。
最后,我们需要将PID控制器的输出信号转化为小车的控制指令。可以通过电机驱动器或者舵机来实现对小车的控制。将控制指令发送给小车,使其按照设定的路线进行自动追踪。
通过以上的设计,我们可以实现基于Matlab的机器人小车路线自动PID追踪。这种设计方案可以提高小车的自动化程度,减少人工干预,提高生产效率。同时,通过Matlab的强大功能和PID控制算法的优势,可以实现精确的路线追踪,提高小车的运动稳定性和精度。
在工业领域中,机器人的自动控制是一个重要的研究方向。针对机器人小车的路线追踪问题,我们可以采用基于Matlab的PID控制算法进行设计。
首先,我们需要获取机器人小车的位置信息。可以通过激光传感器、摄像头或者编码器等设备来获取小车的实时位置数据。这些数据可以作为PID控制算法的输入。
接下来,我们需要设计PID控制器。PID控制器是一种经典的控制算法,它可以根据当前的误差值来调整输出信号,使得系统能够快速、稳定地达到期望的目标。在Matlab中,可以使用PID控制器工具箱来设计和调试PID控制器。
然后,我们需要定义小车的目标路线。可以通过预先设定的路径或者通过遥控器手动控制小车来获取目标路线。目标路线可以作为PID控制算法的参考输入。
接下来,我们将实时获取的小车位置数据和目标路线进行比较,计算出当前的误差值。然后,将误差值作为PID控制器的输入,通过调整输出信号来控制小车的运动。
最后,我们需要将PID控制器的输出信号转化为小车的控制指令。可以通过电机驱动器或者舵机来实现对小车的控制。将控制指令发送给小车,使其按照设定的路线进行自动追踪。
通过以上的设计,我们可以实现基于Matlab的机器人小车路线自动PID追踪。这种设计方案可以提高小车的自动化程度,减少人工干预,提高生产效率。同时,通过Matlab的强大功能和PID控制算法的优势,可以实现精确的路线追踪,提高小车的运动稳定性和精度。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
MartinR
所在区域: 全国
MartinR是一家专注于工业领域的公司。我们擅长于小车、智能小车、电路设计方案、智能家居、图像处理、测试测量、无线充电等领域。我们的产品和解决方案广泛应用于各个行业,包括智能车、智能水表、空气质量监测、心电图检测、红外测温模块等。我们拥有一支专业的团队,具备丰富的经验和技术实力,能够为客户提供高质量的产品和解决方案。
我们的方案包括2020TI电赛省赛C题坡道行驶电动小车设计方案、基于MSP430F5529单片机的ADS1292R心电图心率传感器方案、基于MSP430F5529单片机的MLX906红外温度传感器方案等。我们还提供基于51单片机的八路带语音播报抢答器设计方案、基于HFSS仿真的L波段微带定向耦合器设计方案、基于MATLAB的图像傅里叶阿贝图像处理仿真方案等。这些方案都经过精心设计和验证,能够满足客户的需求。
我们以客户满意为目标,不断创新和进步。无论是工业安全、智能家电还是其他领域,我们都能够为客户提供专业的解决方案和优质的产品。如果您有任何需求或者问题,欢迎与我们联系,我们将竭诚为您服务。