好好学
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
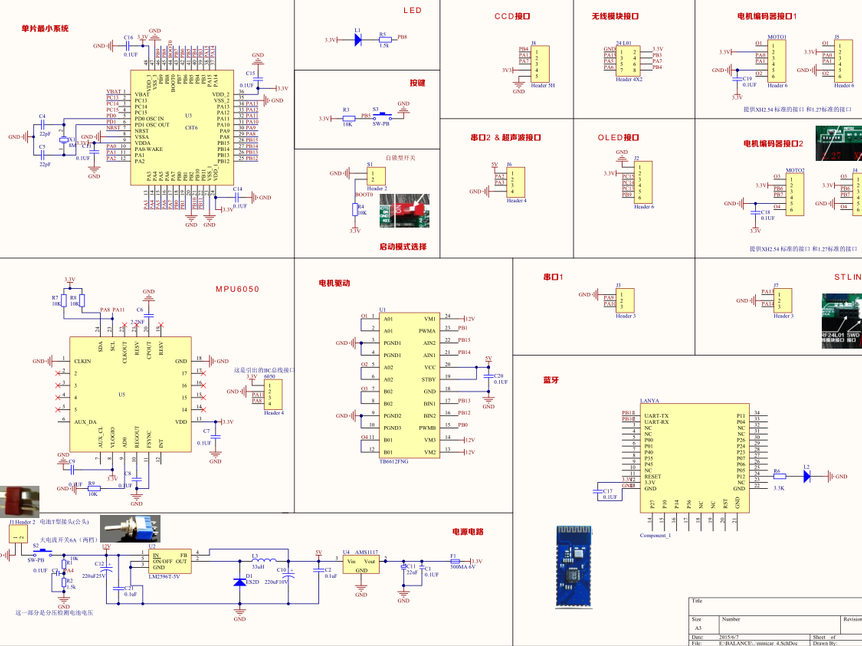
基于STM32F103的平衡车飞行器电路方案包括PWM控制电调、6050传感器获取姿态、NRF24L01或蓝牙实现遥控、超声波定高、IIC总线扩展功能。使用小车电池和充电器,具有稳定控制性能和灵活扩展性,满足飞行器需求。
我们基于STM32F103设计的平衡车飞行器电路方案如下:
首先,我们利用引出来的TIM2的引脚PA0 PA1 PA2 PA3,接电调,提供200HZ的PWM控制电调。这样可以实现对电调的脉宽控制,从而控制飞行器的速度和方向。
接下来,我们利用自带的6050传感器实现飞行器姿态的获取。建议使用四元数算法来处理姿态数据,这样可以更准确地获取飞行器的姿态信息。
为了实现遥控功能,我们可以选择使用无线模块NRF24L01或者蓝牙。NRF24L01的遥控距离可达百米以上,但需要单独制作遥控器。而蓝牙的稳定距离大约为20米左右,但可以直接使用Android手机作为遥控器。
如果需要实现超声波定高功能,可以将超声波传感器接在TIM3的CH1或者CH2引脚上。这样可以通过测量超声波的反射时间来实现飞行器的高度定位。
如果需要增加其他的IIC器件,比如磁力计、气压计等,可以将它们挂载在我们引出的IIC总线上。这样可以方便地扩展飞行器的功能。
至于电池和充电器,我们可以使用小车上面的电池和充电器。小车自带的电池是20C的,完全可以用作飞行器电池。充电器是平衡充,可以无缝衔接。
通过以上的电路方案,我们可以实现基于STM32F103的平衡车飞行器。这个方案具有稳定的控制性能和灵活的扩展性,可以满足飞行器的各种需求。
首先,我们利用引出来的TIM2的引脚PA0 PA1 PA2 PA3,接电调,提供200HZ的PWM控制电调。这样可以实现对电调的脉宽控制,从而控制飞行器的速度和方向。
接下来,我们利用自带的6050传感器实现飞行器姿态的获取。建议使用四元数算法来处理姿态数据,这样可以更准确地获取飞行器的姿态信息。
为了实现遥控功能,我们可以选择使用无线模块NRF24L01或者蓝牙。NRF24L01的遥控距离可达百米以上,但需要单独制作遥控器。而蓝牙的稳定距离大约为20米左右,但可以直接使用Android手机作为遥控器。
如果需要实现超声波定高功能,可以将超声波传感器接在TIM3的CH1或者CH2引脚上。这样可以通过测量超声波的反射时间来实现飞行器的高度定位。
如果需要增加其他的IIC器件,比如磁力计、气压计等,可以将它们挂载在我们引出的IIC总线上。这样可以方便地扩展飞行器的功能。
至于电池和充电器,我们可以使用小车上面的电池和充电器。小车自带的电池是20C的,完全可以用作飞行器电池。充电器是平衡充,可以无缝衔接。
通过以上的电路方案,我们可以实现基于STM32F103的平衡车飞行器。这个方案具有稳定的控制性能和灵活的扩展性,可以满足飞行器的各种需求。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
好好学
所在区域: 全国
好好学是一家专注于智能车领域的公司。我们擅长设计和开发各类智能车产品,包括平衡车和飞行器等。我们的团队拥有丰富的经验和专业知识,能够提供高质量的解决方案。
我们的核心产品是基于STM32F103设计的平衡车和飞行器电路方案。这些方案包括详细的原理图和源码,可以帮助客户快速搭建自己的智能车产品。我们的方案经过精心设计和优化,具有稳定性和可靠性,能够满足客户的需求。
除了平衡车和飞行器,我们还可以根据客户的需求提供其他智能车产品的设计和开发服务。我们的团队具有丰富的技术经验和创新能力,能够为客户提供定制化的解决方案。
我们的目标是为客户提供高品质的智能车产品和解决方案,帮助他们实现自己的创意和梦想。我们致力于与客户建立长期合作关系,共同推动智能车领域的发展。
如果您对我们的产品和服务感兴趣,欢迎随时联系我们,我们将竭诚为您提供帮助。