好好学
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
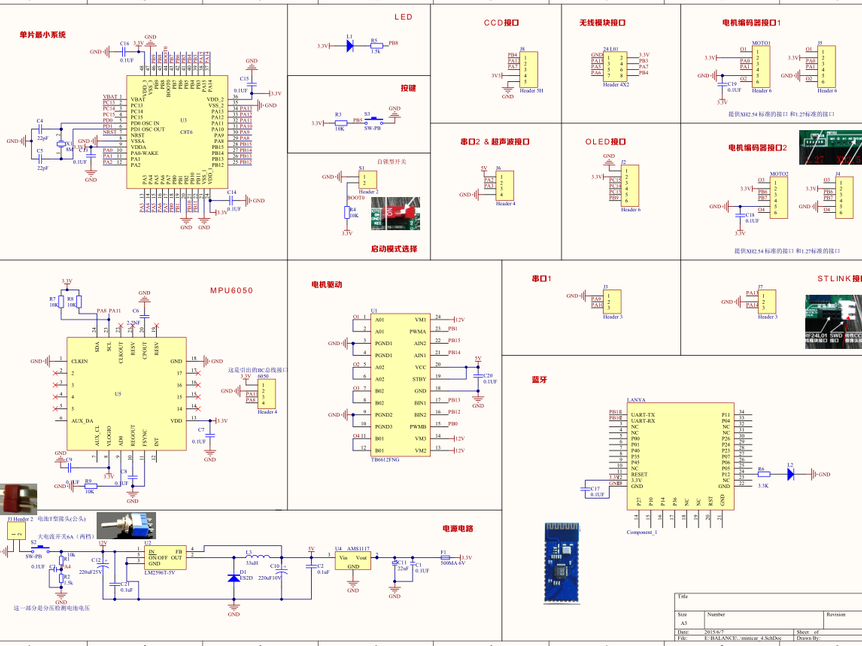
我们提供基于STM32F103的平衡车电路方案,包括硬件设计、传感器数据采集、控制算法实现、电机驱动和源代码编写。使用STM32F103微控制器作为主控芯片,选择合适的传感器和外设。通过编写代码采集传感器数据,并使用PID控制器实现平衡控制。使用电机驱动器控制电机转速和方向。最后,提供源代码供参考和使用,帮助您构建稳定可靠的平衡车系统。
解决方案:
为了实现基于STM32F103的平衡车电路方案,我们需要以下步骤:
1. 硬件设计:
首先,我们需要设计平衡车的硬件电路。这包括选择合适的传感器,如加速度计和陀螺仪,以及电机驱动器和电源管理电路。我们可以使用STM32F103微控制器作为主控芯片,并根据平衡车的需求选择合适的外设和接口。
2. 传感器数据采集:
在硬件设计完成后,我们需要编写代码来采集传感器数据。通过使用STM32F103的ADC模块,我们可以将加速度计和陀螺仪的数据转换为数字信号。这些数据将用于计算平衡车的倾斜角度和角速度。
3. 控制算法实现:
接下来,我们需要实现平衡车的控制算法。这可以通过使用PID控制器来实现。PID控制器将根据倾斜角度和角速度的测量值来计算电机的控制信号,以使平衡车保持平衡。
4. 电机驱动:
为了控制平衡车的运动,我们需要使用电机驱动器来控制电机的转速和方向。通过使用PWM信号,我们可以调整电机的转速,并通过控制电机的相序来改变方向。
5. 源代码编写:
最后,我们需要编写源代码来实现上述功能。我们可以使用STM32CubeIDE或其他适用的开发环境来编写代码,并使用STM32的库函数来简化开发过程。
通过以上步骤,我们可以实现基于STM32F103的平衡车电路方案,并提供相应的源代码供参考和使用。这将使您能够构建一个稳定、可靠的平衡车系统。
为了实现基于STM32F103的平衡车电路方案,我们需要以下步骤:
1. 硬件设计:
首先,我们需要设计平衡车的硬件电路。这包括选择合适的传感器,如加速度计和陀螺仪,以及电机驱动器和电源管理电路。我们可以使用STM32F103微控制器作为主控芯片,并根据平衡车的需求选择合适的外设和接口。
2. 传感器数据采集:
在硬件设计完成后,我们需要编写代码来采集传感器数据。通过使用STM32F103的ADC模块,我们可以将加速度计和陀螺仪的数据转换为数字信号。这些数据将用于计算平衡车的倾斜角度和角速度。
3. 控制算法实现:
接下来,我们需要实现平衡车的控制算法。这可以通过使用PID控制器来实现。PID控制器将根据倾斜角度和角速度的测量值来计算电机的控制信号,以使平衡车保持平衡。
4. 电机驱动:
为了控制平衡车的运动,我们需要使用电机驱动器来控制电机的转速和方向。通过使用PWM信号,我们可以调整电机的转速,并通过控制电机的相序来改变方向。
5. 源代码编写:
最后,我们需要编写源代码来实现上述功能。我们可以使用STM32CubeIDE或其他适用的开发环境来编写代码,并使用STM32的库函数来简化开发过程。
通过以上步骤,我们可以实现基于STM32F103的平衡车电路方案,并提供相应的源代码供参考和使用。这将使您能够构建一个稳定、可靠的平衡车系统。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
好好学
所在区域: 全国
好好学是一家专注于智能车领域的公司。我们擅长设计和开发各类智能车产品,包括平衡车和飞行器等。我们的团队拥有丰富的经验和专业知识,能够提供高质量的解决方案。
我们的核心产品是基于STM32F103设计的平衡车和飞行器电路方案。这些方案包括详细的原理图和源码,可以帮助客户快速搭建自己的智能车产品。我们的方案经过精心设计和优化,具有稳定性和可靠性,能够满足客户的需求。
除了平衡车和飞行器,我们还可以根据客户的需求提供其他智能车产品的设计和开发服务。我们的团队具有丰富的技术经验和创新能力,能够为客户提供定制化的解决方案。
我们的目标是为客户提供高品质的智能车产品和解决方案,帮助他们实现自己的创意和梦想。我们致力于与客户建立长期合作关系,共同推动智能车领域的发展。
如果您对我们的产品和服务感兴趣,欢迎随时联系我们,我们将竭诚为您提供帮助。