快乐老家
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
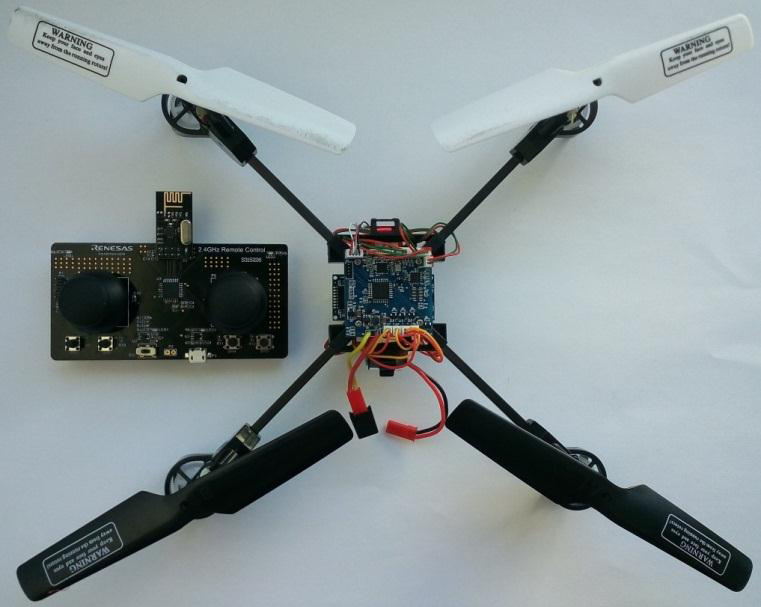
我们提供了一个解决方案,用于实现瑞萨四轴飞行器设计的全部资料开源。该方案包括硬件设计、软件设计、姿态测量和偏航角测量等步骤。通过PID控制算法和MPU6050姿态芯片,我们可以实现飞行器的平衡控制和姿态测量。该设计适用于航拍、玩具等领域,为用户提供稳定、可靠的飞行体验。附件中的截图提供了更详细的信息。如有任何问题,请随时与我们联系。
解决方案:
为了实现瑞萨四轴飞行器设计的全部资料开源,我们需要采取以下步骤:
1. 硬件设计:根据四轴飞行器的原理和飞行模式,设计出合适的硬件结构框图。确保四个电机一对正转,一对反转,以实现垂直方向旋转的反扭矩平衡,从而保证飞行的稳定。
2. 软件设计:在四轴飞行器的平衡控制方面,采用PID控制算法来调节电机的转速。PID控制算法通过整合空间三轴俯仰、翻滚和偏航的控制量,以油门为基准来决定电机的转速。例如,当四轴飞行器机头向下倾斜时,电机3和电机4增大转速,电机1和电机2减小转速,以实现平衡。
3. 姿态测量:使用姿态芯片MPU6050来获取空间三轴的旋转角速率,从而得到俯仰、翻滚和偏航的控制量。MPU6050的姿态刷新频率约为10ms一次,可以提供准确的姿态测量数据。
4. 偏航角测量:由于MPU6050无法测得实际偏航角,需要借助电子罗盘来测量。然而,由于电子罗盘受到四个电机的电磁作用影响较大,精度会受到一定影响。因此,在偏航控制量中,只使用微分项来计算偏航角的控制量。
通过以上的硬件和软件设计,我们可以实现瑞萨四轴飞行器的平衡控制和姿态测量。这样的设计可以应用于航拍、玩具等领域,为用户提供稳定、可靠的飞行体验。
附件中的硬件+软件设计分析截图可以提供更详细的信息,帮助用户更好地理解和实施该设计方案。
希望以上解决方案能够满足您的需求,如果有任何问题,请随时与我们联系。
为了实现瑞萨四轴飞行器设计的全部资料开源,我们需要采取以下步骤:
1. 硬件设计:根据四轴飞行器的原理和飞行模式,设计出合适的硬件结构框图。确保四个电机一对正转,一对反转,以实现垂直方向旋转的反扭矩平衡,从而保证飞行的稳定。
2. 软件设计:在四轴飞行器的平衡控制方面,采用PID控制算法来调节电机的转速。PID控制算法通过整合空间三轴俯仰、翻滚和偏航的控制量,以油门为基准来决定电机的转速。例如,当四轴飞行器机头向下倾斜时,电机3和电机4增大转速,电机1和电机2减小转速,以实现平衡。
3. 姿态测量:使用姿态芯片MPU6050来获取空间三轴的旋转角速率,从而得到俯仰、翻滚和偏航的控制量。MPU6050的姿态刷新频率约为10ms一次,可以提供准确的姿态测量数据。
4. 偏航角测量:由于MPU6050无法测得实际偏航角,需要借助电子罗盘来测量。然而,由于电子罗盘受到四个电机的电磁作用影响较大,精度会受到一定影响。因此,在偏航控制量中,只使用微分项来计算偏航角的控制量。
通过以上的硬件和软件设计,我们可以实现瑞萨四轴飞行器的平衡控制和姿态测量。这样的设计可以应用于航拍、玩具等领域,为用户提供稳定、可靠的飞行体验。
附件中的硬件+软件设计分析截图可以提供更详细的信息,帮助用户更好地理解和实施该设计方案。
希望以上解决方案能够满足您的需求,如果有任何问题,请随时与我们联系。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
快乐老家
所在区域: 全国
快乐老家是一家专注于工业领域的创新科技公司。我们擅长以太网、无线充电、app控制、考勤系统、智能家居、温度控制系统、定位系统、51单片机、人体感应电路、电磁感应电路、MCP2515、CAN-BUS、工业总线、M542、音频发射器、iPod、FMT8011、RGB彩灯控制源码、app控制LED灯、考勤机等领域。
我们提供多种解决方案,包括参赛-人体感应LED餐桌、VS1053-实时MIDI乐器/音乐播放器设计、CSR蓝牙4.0双模HM-13蓝牙模块设计、W5500以太网开发板设计、MCP2515 CAN-BUS工业总线控制板设计、WPC规范的4路PWM控制无线充电解决方案等。我们的方案涵盖了硬件设计、源代码、制作流程等,为客户提供全方位的支持。
快乐老家致力于为客户提供高质量的产品和解决方案。我们的团队拥有丰富的经验和专业知识,能够根据客户的需求定制最适合的解决方案。我们的产品和解决方案已经在多个行业得到了广泛应用,取得了良好的效果。
如果您对我们的产品和解决方案感兴趣,欢迎联系我们,我们将竭诚为您提供优质的服务。快乐老家,让科技创新带给您更多的便利和快乐。