qupopo123
所在地区:
全国
首页
服务/硬件产品
行业解决方案
案例
方案概述:
我们提供了一个基于51单片机的解决方案,用于实现8路舵机的PWM控制。通过设计电路和编写源代码,我们可以调节PWM信号的高电平部分的宽度,从而控制舵机的角度在-90度到90度之间变化。我们还考虑了舵机的追随特性,以实现最连贯的运动。如果您有任何问题或需要进一步的帮助,请随时告诉我们。
根据标题“8路舵机PWM控制电路和源代码”,我们可以提供以下解决方案:
为了实现对8路舵机的PWM控制,我们可以设计一个电路和编写相应的源代码。首先,我们需要了解舵机的工作原理和控制方式。
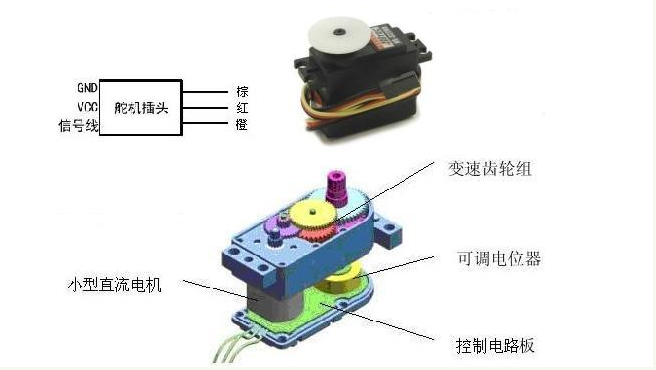
舵机的控制信号由接收机的通道进入信号调制芯片,通过与电位器的电压比较,产生电压差输出。这个电压差的正负决定了舵机的正反转。舵机的控制一般需要一个20ms左右的时基脉冲,其中高电平部分控制舵机的角度。以180度角度伺服为例,0.5ms对应0度,1.0ms对应45度,1.5ms对应90度,2.0ms对应135度,2.5ms对应180度。
为了实现8路舵机的控制,我们可以使用51单片机来生成PWM信号,并通过两个按键开关来控制舵机的正转和反转。通过调节PWM信号的高电平部分的宽度,我们可以控制舵机的角度在-90度到90度之间变化。
此外,舵机的追随特性也需要考虑。当舵机从一个位置转向另一个位置时,需要一定的时间才能到达目标位置。这个时间称为保持时间。如果保持时间大于等于舵机的最小变化量,舵机能够到达目标位置并有剩余时间。如果保持时间小于舵机的最小变化量,舵机无法到达目标位置。为了实现最连贯的运动,我们可以将保持时间设置为舵机的最小变化量。
在实际设计中,我们可以根据舵机的分辨率和速度需求来确定PWM信号的变化量。例如,如果舵机的分辨率为8us,我们可以将PWM信号以最小变化量即8us依次变化,这样可以获得最高的分辨率,但速度会相应减慢。
综上所述,我们可以设计一个基于51单片机的电路和编写相应的源代码来实现8路舵机的PWM控制。通过调节PWM信号的高电平部分的宽度,我们可以控制舵机的角度在-90度到90度之间变化,并考虑舵机的追随特性来实现最连贯的运动。
希望以上解决方案对您有所帮助。如果您有任何问题或需要进一步的帮助,请随时告诉我们。
为了实现对8路舵机的PWM控制,我们可以设计一个电路和编写相应的源代码。首先,我们需要了解舵机的工作原理和控制方式。
舵机的控制信号由接收机的通道进入信号调制芯片,通过与电位器的电压比较,产生电压差输出。这个电压差的正负决定了舵机的正反转。舵机的控制一般需要一个20ms左右的时基脉冲,其中高电平部分控制舵机的角度。以180度角度伺服为例,0.5ms对应0度,1.0ms对应45度,1.5ms对应90度,2.0ms对应135度,2.5ms对应180度。
为了实现8路舵机的控制,我们可以使用51单片机来生成PWM信号,并通过两个按键开关来控制舵机的正转和反转。通过调节PWM信号的高电平部分的宽度,我们可以控制舵机的角度在-90度到90度之间变化。
此外,舵机的追随特性也需要考虑。当舵机从一个位置转向另一个位置时,需要一定的时间才能到达目标位置。这个时间称为保持时间。如果保持时间大于等于舵机的最小变化量,舵机能够到达目标位置并有剩余时间。如果保持时间小于舵机的最小变化量,舵机无法到达目标位置。为了实现最连贯的运动,我们可以将保持时间设置为舵机的最小变化量。
在实际设计中,我们可以根据舵机的分辨率和速度需求来确定PWM信号的变化量。例如,如果舵机的分辨率为8us,我们可以将PWM信号以最小变化量即8us依次变化,这样可以获得最高的分辨率,但速度会相应减慢。
综上所述,我们可以设计一个基于51单片机的电路和编写相应的源代码来实现8路舵机的PWM控制。通过调节PWM信号的高电平部分的宽度,我们可以控制舵机的角度在-90度到90度之间变化,并考虑舵机的追随特性来实现最连贯的运动。
希望以上解决方案对您有所帮助。如果您有任何问题或需要进一步的帮助,请随时告诉我们。
为您推荐其他供应商的行业解决方案
免责声明:本网站部分内容来源互联网,如权利人发现存在侵权信息,请及时与本站联系删除。
供应商:
qupopo123
所在区域: 全国
qupopo123是一家专注于物联网领域的公司,擅长提供物联网解决方案和硬件设计。我们的产品涵盖了多个领域,包括气体传感器、声音传感器、压力传感器、称重传感器、六轴陀螺仪、二氧化碳传感器等。我们还提供智能手表、电池管理系统、太阳能发电等产品。同时,我们也擅长51单片机、CH340T、PL2302等硬件开发和电路设计。我们的解决方案包括物联网开发、电导率测量、OLED液晶屏上位机、继电器工控板等。我们还提供各种源码、原理图、PCB设计和驱动程序等资料,方便客户进行DIY制作和开发。qupopo123致力于为客户提供高质量的物联网产品和解决方案,以满足不同行业的需求。